Дослідники з Гарвардського університету представили новий прорив у сфері робототехніки, створивши найприродніші 3D-друковані м’язи для м’яких роботів. Ця технологія може суттєво змінити підходи до розробки автономних систем, які здатні виконувати складні завдання в умовах, де традиційна механіка не є ефективною. М’які роботи вже давно привертають увагу науковців завдяки своїй гнучкості та адаптивності. Проте одним із головних викликів залишалася реалізація рухових механ
Наближається той день, коли ви зможете пройти повз робота і навіть не здогадатися, що це робот. Протягом років розробок минаділили роботів скелетами, мізками, органамичуття і навіть нервовою системою. М’язи виявилися особливо складними.
Дослідники з Гарвардської школи інженерних та прикладних наук імені Джона А. Полсонарозробили метод3D-друку штучних м’язоподібних ниток, рух яких фактично запрограмований безпосередньо в самому матеріалі.
Їхня робота, здається, є найбільш наближеною до людиноподібних м’язів серед усіх систем робототехнічних м’язів, що існують. Річ у тім, що природний світ потребує гнучкості. Все, від дерев до восьминогів,згинається і скручується. Ми також побудувалилюдський світ, який вимагає такої ж адаптивності. Інфраструктура, одяг, інструменти і навіть соціальна взаємодія — все було розроблено навколо механіки м’яких біологічних тіл.
Окрім гнучкості, взаємодія з нашим світом є однією з причин, чому інженери-робототехніки продовжують намагатися зробити машини більш схожими на людей, оснащуючи їх системами зору (очима), мікрофонами (вухами), динаміками (ротом), датчиками дотику та багатьма іншими системами.
Ці системи стали надзвичайно функціональними та ефективними. Проте м’язи було важко відтворити. Для людей м’язи — цепросто ще одна річ, яку ми не помічаємо. Ви думаєте про те, щоб поворухнути рукою, і раптом вона піднімається, ніби за помахом чарівної палички. Це абсурдно складна біологічна система приводу.
“Ті самі м’язи, що можуть обережно вести пензель по полотну, можуть також вибивати двері, кидати сокири, виконувати балетні па або ловити скляний посуд, що падає, перш ніж він вдариться об підлогу. Такий рівень контролю вражає з інженерної точки зору”, — зазначають дослідники.
Традиційні роботи вже надзвичайно добре рухаються, використовуючи електродвигуни, гідравліку та пневматичні системи. Однак ці системи зазвичай жорсткі, механічно складні та не надто витончені. Справді плавний, органічний рух залишається набагато складнішим для відтворення.
Насправді дослідники вже розробляли м’які робототехнічні м’язи раніше. Пневматичні штучні м’язи, наприклад, використовують стисненеповітря для створення плавного біологічногоруху. Інші системи використовують термочутливі метали, електрично чутливі полімери, магнітні матеріали або тросові системи сухожиль, натхненні самим людським тілом. Багато з них є надзвичайно ефективними.
Ці системи зазвичай потребують громіздких зовнішніх компресорів, трубопроводів або важких систем підтримки. Інші потребують надзвичайно високої напруги, виділяють надмірне тепло, рухаються повільно або їх важко виготовити у складних формах. У багатьох випадках сам “м’яз” є лише частиною набагато більшої механічної системи.
Дослідники знайшли більш елегантний підхід. Замість того, щоб створювати роботів зокремими двигунами та рухомими механізмами, команда розробила метод 3D-друку штучних, схожих на м’язи, ниток, чий рух фактично запрограмований безпосередньо в матеріалі.
“Наша система поєднує два типи м’яких матеріалів: “активний” рідкокристалічний еластомер, який змінює форму при нагріванні, і пасивний еластомер, який чинить опір деформації. Друкуючи обидва матеріали пліч-о-пліч через сопло, що обертається, ми можемо точно контролювати, як різні частини нитки поводитимуться згодом”, — йдеться у дослідженні.
Активний матеріал стискається вздовж пріоритетного молекулярного напрямку при нагріванні. Оскільки пасивний матеріал чинить опір цьому стисненню, ця невідповідність змушує нитку згинатися, скручуватися, витися або згортатися в спіраль. Обертання сопла під час друку додає ще один рівень контролю, записуючи спіральні візерунки молекулярного вирівнювання безпосередньо в структуру.
Одинарну нитку можна запрограмувати на випрямлення, закручування по спіралі, затягування,скорочення або розширення залежно від того, як розташовані її внутрішні матеріали — без шестерень, жорстких з’єднань або механічних систем післяскладального етапу.
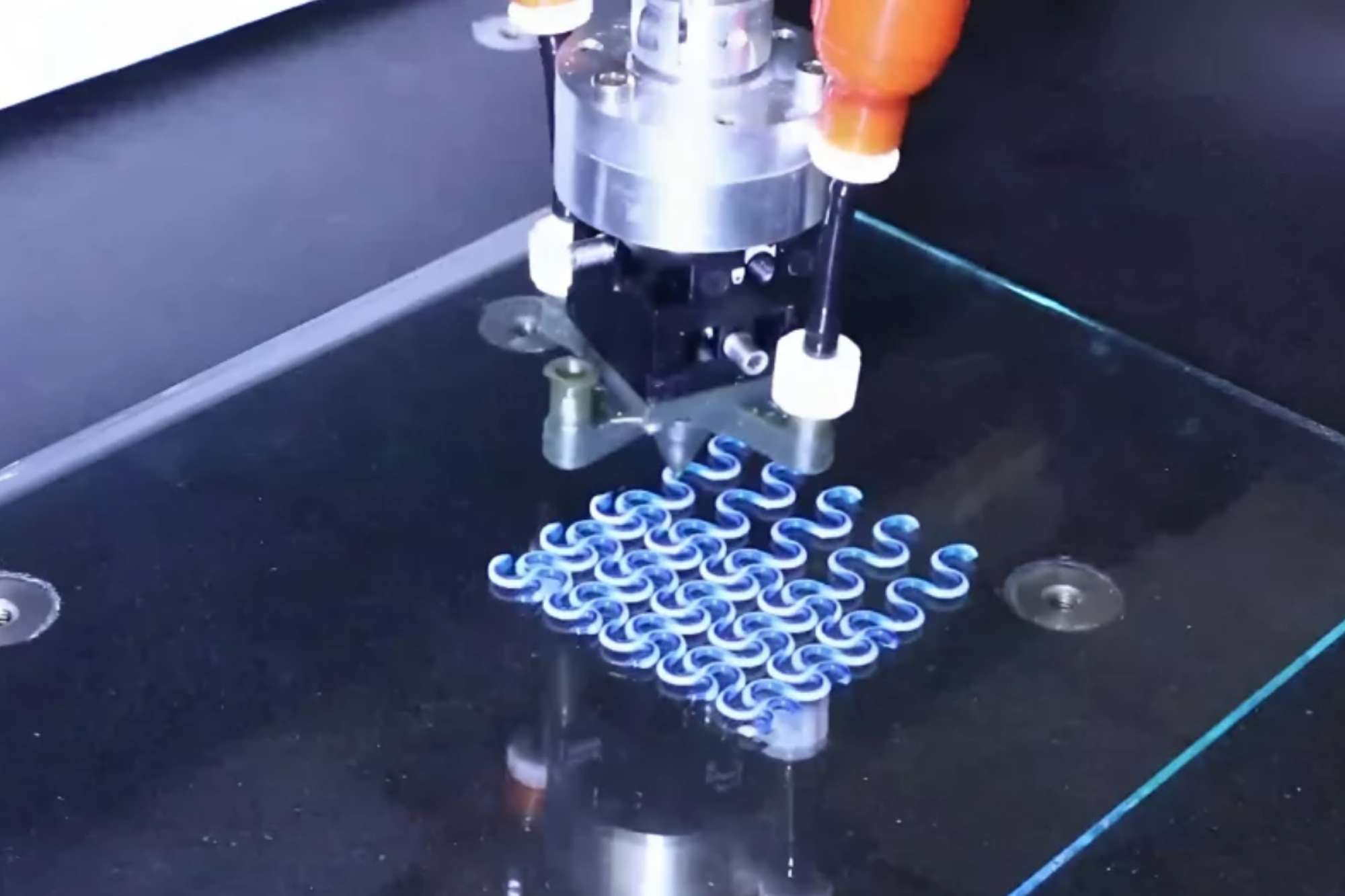
“Наша команда продемонструвала це, надрукувавши м’які решітки та хвилеподібні нитки, які кардинально по-різному деформуються під дією тепла. Деякі структури розширювалися при нагріванні, тоді як інші скорочувалися. В одній демонстрації плоскі решітки перетворювалися на куполоподібні форми. В іншій ми створили м’які захвати, здатні опускатися на об’єкти, стискатися навколо них, піднімати їх і згодом відпускати”, — кажуть дослідники.
Вони додають, що ця технологія з часом може дозволити створити адаптивні м’які роботизовані захвати, активні фільтри, біомедичні пристрої, термочутливі структури та роботизовані системи, що змінюють форму. Оскільки цей підхід сумісний із 3D-друком, він також відкриває двері для високоналаштовуваних архітектур, які було б важко побудувати за допомогою звичайних актуаторів.
Проте все ще існують серйозні обмеження. Наразі система покладається на тепло для активації, що означає, щочас відгуку та енергоефективність залишаютьсяскладними завданнями. Структури також все ще є експериментальними і далеко не готові замінити традиційні робототехнічні приводи у високонавантажених сферах застосування.
Їстівна електроніка? Чому б ні: вчені навчили 3D-принтер друкувати мікрохвилями на кістках та листі рослин